본 포스트에서는 (주)인스페이스에서 제작한 유니티 기반 드론 강화학습 환경을 이용하여 드론 장애물 환경을 제작해보도록하겠습니다.
저장소 링크 : https://github.com/InSpaceAI/RL-InDrone
지금부터 기존 환경을 이용하여 위 환경을 제작해보겠습니다.
먼저 저장소 링크에 있는 UnitySDK를 유니티로 열고 Project창에 있는 DroneFlight 환경을 클릭하고 Ctrl+D를 눌러 복제합니다.
복제를 하면 다음과 같은 폴더가 생성 됩니다.
그럼 생성된 폴더에서 Drone Flight는 모두 Drone Obstacle로, DF는 모두 DO로 바꿔주겠습니다.
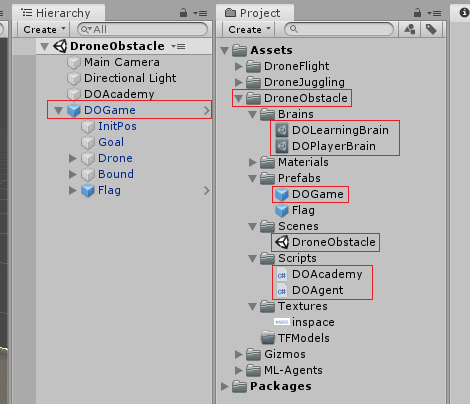
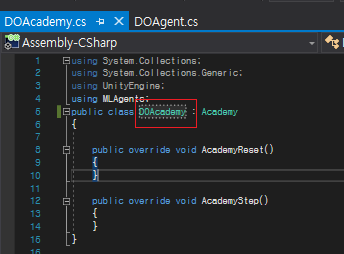
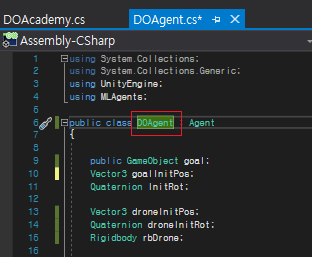
다음 그림과 같이 Academy와 Agent 스크립트 안에있는 클래스도 바꿔줍니다.
다음으로 장애물을 생성해보겠습니다.
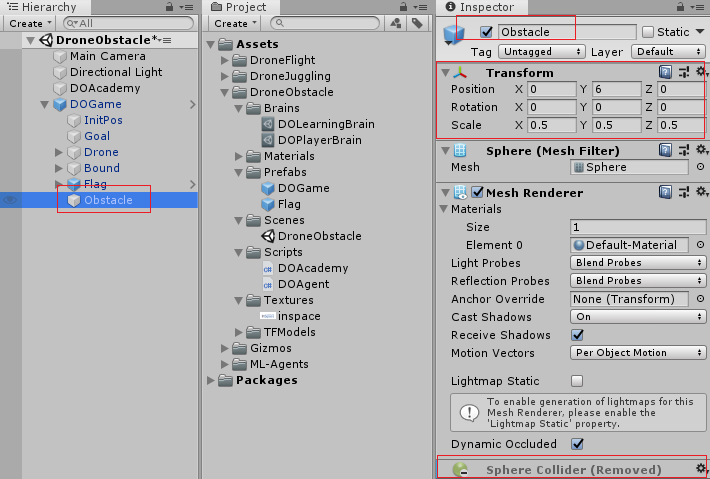
먼저 DOGame을 우클릭하여 3DObject -> Shpere 클릭하여 Sphere를 생성하고 아래 그림과 같이 Inspector를 변경해줍니다. Collider를 제거하여 드론이 장애물을 통과할 수 있게 해줍니다(드론과 장애물이 일정거리 이상 가까워지면 실패처리를 하기 위함)
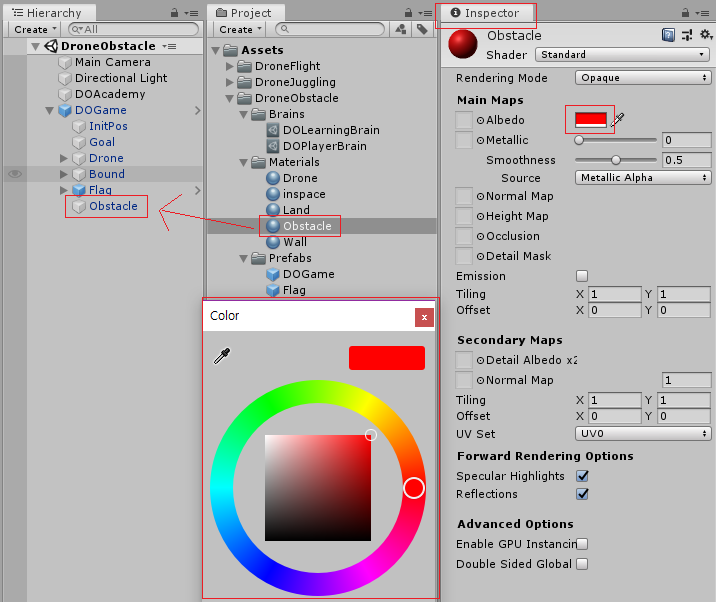
그 다음으로 Project 창의 Materials을 우클릭하고 Create-> Material을 통해 Obstacle Material을 생성해주고 Hierachy의 Obstacle에 드래그하여 임포트하고 Obstacle Material을 클릭하여 Inspector의 Albedo 옆의 색을 클릭하여 Color창을 띄우고 원하는 색으로 변경합니다.
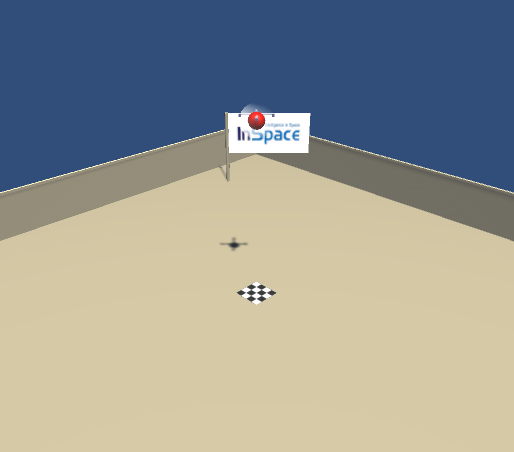
현재까지 작업을 잘 마쳤으면 다음 그림과 같은 상황이 됩니다.
현재까지 잘 진행이 되었다면 이제 DOAgent 스크립트를 수정해보겠습니다.
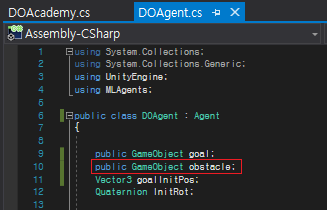
먼저 장애물을 추가하기 위해 아래 그림과 같이 다음 코드를 추가해줍니다.
public GameObject obstacle;
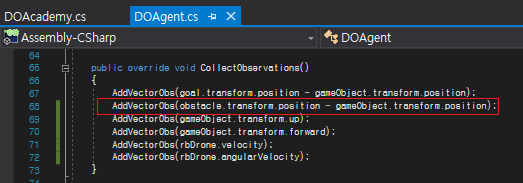
그리고 에이전트에게 장애물 위치를 상태로 알려주기 위해 CollectObservations 함수에 아래 그림과 같이 다음 코드를 추가해줍니다.
AddVectorObs(obstacle.transform.position - gameObject.transform.position);
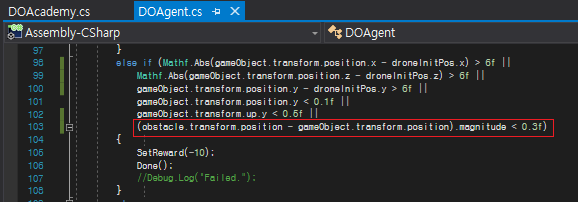
그 다음 장애물에 일정거리에 도달하면 실패하도록 하기 위해 AgentAction 함수의 실패 조건이 있는 부분에 아래 그림과 같이 다음 코드를 추가해줍니다.
obstacle.transform.position - gameObject.transform.position).magnitude<0.3f
그 다음 에피소드가 리셋이 되었을때 목적지 및 드론 장애물을 설정하기 위해 아래 그림과 같이 AgentReset()에 목적지 생성 부분을 수정하고 장애물 생성 코드를 추가합니다.
var theta1 = Random.Range(-Mathf.PI, Mathf.PI);
var theta2 = Random.Range(-Mathf.PI, Mathf.PI);
var radius = Random.Range(1f, 5f);
goal.transform.position = droneInitPos +
new Vector3(radius * Mathf.Sin(theta1) * Mathf.Cos(theta2),
radius * Mathf.Sin(theta1) * Mathf.Sin(theta2),
radius * Mathf.Cos(theta1));
obstacle.transform.position = droneInitPos +
(goal.transform.position - droneInitPos) * Random.Range(0.3f, 0.8f) +
new Vector3(Random.Range(-0.2f, 0.2f),
Random.Range(-0.2f, 0.2f),
Random.Range(-0.2f, 0.2f)); //Noise term
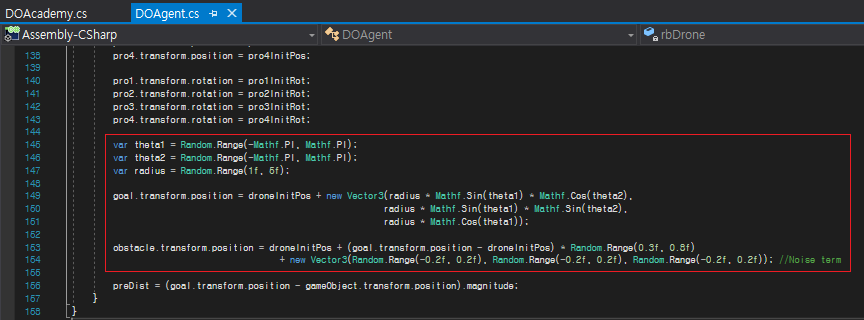
먼저 좌표계를 사용하지 않고 극좌표계를 사용한 이유는 드론과 목적지 사이의 거리를 조절하기 쉽게 하기 위함입니다. 장애물이 어느정도 목적지까지 가는 경로에 생성되기를 원했고, 만약 이 경우 드론과 목적지가 너무 가까워지면 장애물 또한 드론에 가까워져 에피소드가 시작과 동시에 실패하게됩니다. 이 경우를 막기 위해 드론과 목적지 사이의 거리를 조절하게 되었습니다. 따라서 이를 통해 목적지를 드론에서부터 1~5 사이에 생성시켰고 장애물을 이 사이에 랜덤한 비율에 노이즈를 추가하여 생성하였습니다.
이렇게 Agent 스크립트 수정을 마쳤습니다.
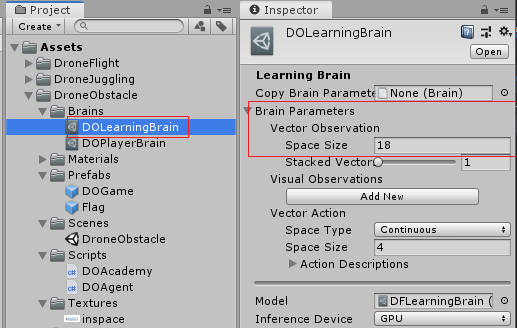
다음으로 이 전에 드론과 장애물 사이의 벡터를 Observation으로 추가한 것을 적용하기 위해 Brain의 Vector Observation 차원을 아래 그림과 같이 15에서 18로 변경해줍니다.
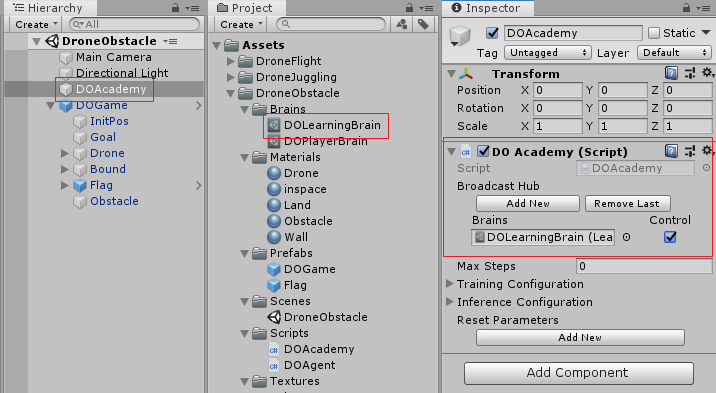
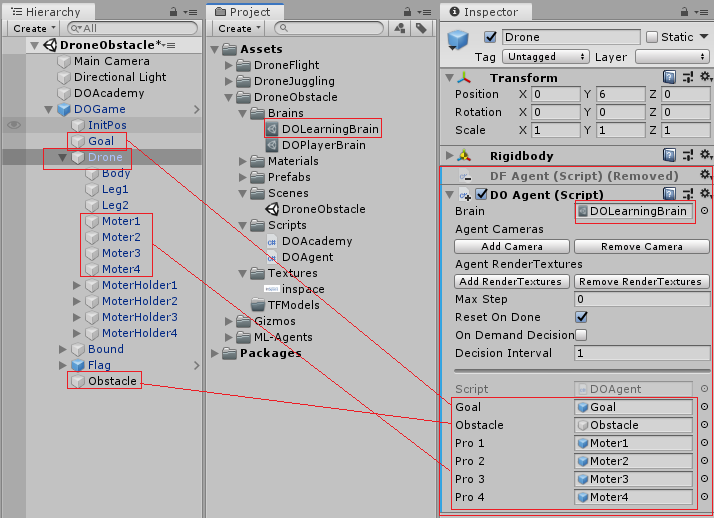
그리고 DOAcademy, Drone에 DFAcademy, DFAgent 스크립트를 제거하고 DOAcademy, DOAGents를 추가합니다. 그리고 아래 그림과 같이 DOAcademy에 DOLearningBrain을 넣어주고 Control을 체크, DOAgent에 해당 설정변수들을 넣어줍니다.
자 그럼 이제 환경 제작을 마쳤으니 ml-agents 내장 ppo를 통해 학습해보도록 하겠습니다.
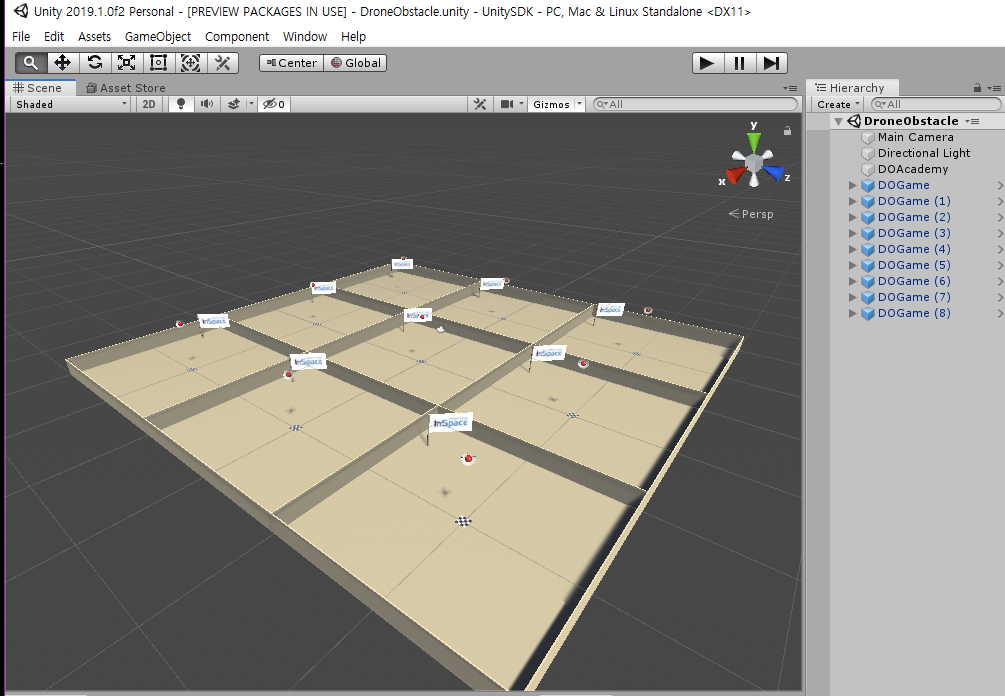
빌드할 때 아래 그림처럼 환경을 여러개로 복제하여 학습을 진행하면 보다 안전하고 빠르게 학습을 할 수 있습니다.
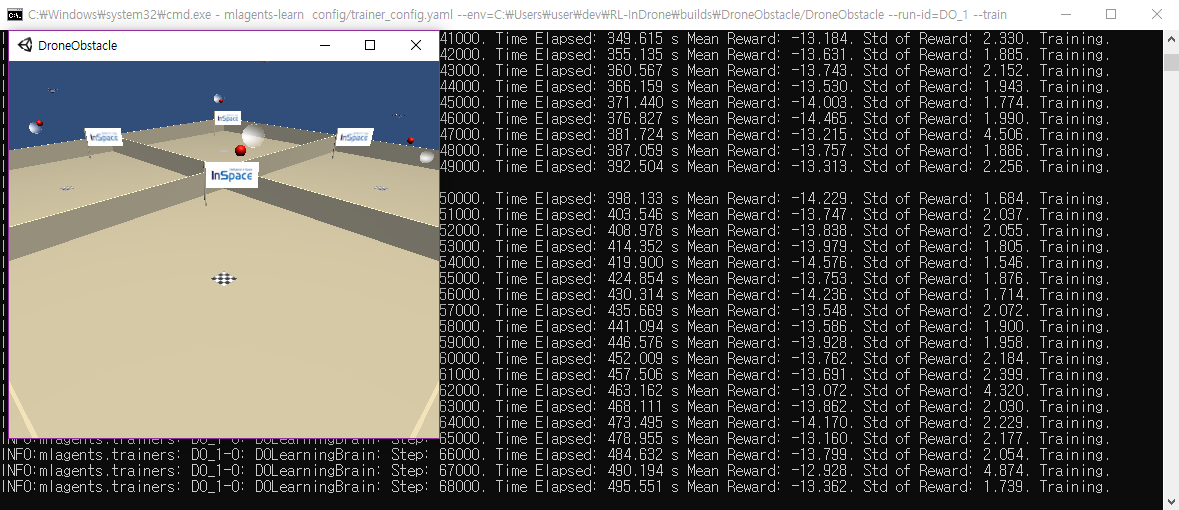
그러면 내장 ppo를 통해 학습을 진행합니다. 내장 ppo 학습 관련 자세한 사항에 대해서는 튜토리얼을 참고하세요
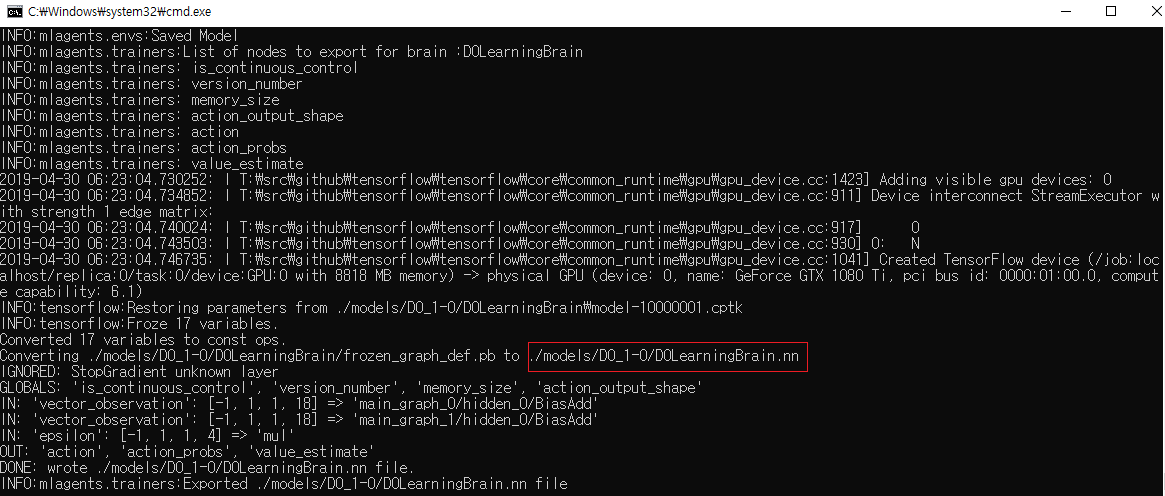
학습이 완료되었다면 모델이 저장된 경로에 들어가 DroneObstacle의 TFModels 폴더에 복사해줍니다.
그리고 새로 복사한 모델을 적용하고 플레이하여 잘 작동되는지 확인합니다.
이상 여기까지 기존 환경을 이용해서 새로운 환경을 제작하는 포스트를 마치겠습니다.